Tải ứng dụng:
BÁO ĐIỆN TỬ CHÍNH PHỦ
 |
|
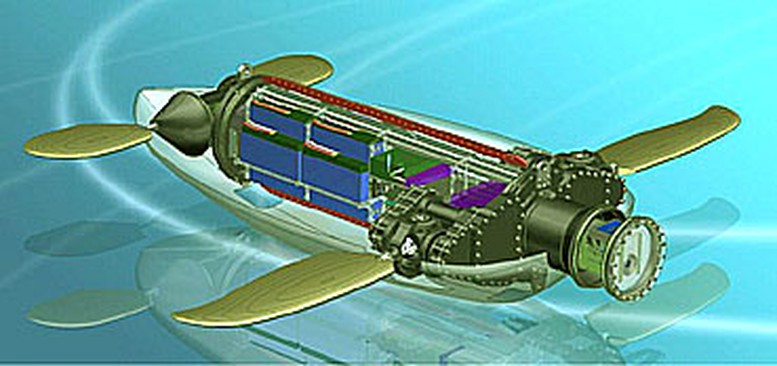
Mô hình của robot "rùa biển" Naro – tartaruga |
Loài rùa biển bơi dưới nước nhanh và linh hoạt nhờ có hai vây chèo phía trước, robot cũng có hai vây trước to, với các khớp đa chiều, khiến nó “quay trở” dễ dàng. Hai vây sau chủ yếu giữ cân bằng.
Về tốc độ, ý tưởng thiết kế loại robot này sao cho đạt khoảng 2 mét/ giây. Rùa có mai cứng hình mái vòm lớn, nên tạo vỏ cứng chắc chắn. Vỏ robot cũng mô phỏng như vậy, làm bằng hợp kim nhôm, chịu được áp suất cao, chống rò rỉ, chịu thấm nước.
Bên trong robot rùa biển là các thiết bị điện tử, bao gồm các cảm biến rất nhạy về âm thanh, nhiệt độ hay các loại sóng của tàu bè phát ra…
Trong robot, đáng kể nhất là bộ định vị GPS, la bàn từ-điện, bộ mã hóa lệnh chạy động cơ điện. Giao diện đầu vào và ra cho phép các mô-đun làm nhiệm vụ khác nhau, tùy thuộc vào mục đích sử dụng robot như trinh sát, thăm dò, kiểm tra môi trường. Máy tính trong thân robot là chip vi xử lý lõi kép COi7, các sensor (cảm biến), động cơ điện, hệ nhận lệnh, hệ chấp hành cơ-điện… Chiều dài robot là 1 mét. Trọng lượng tất cả “con rùa” Naro –-tartaruga này khoảng 75 kg.
Mẫu thử nghiệm robot được điều khiển từ xa, bài tập thông dụng nhất của nó là điều hướng dưới nước tự động. Không thấy nói đến thời gian hoạt động và bán kính tác nghiệp của "rùa" ở dưới nước.
Nhóm nghiên cứu đang quan tâm thêm về hệ thống vỗ vây đẩy của “rùa biển” sao cho tiết kiệm năng lượng nhất.
Trần Văn (theo Gizmag)
Giấy phép số: 102/GP-BTTTT, cấp ngày 15/04/2024.
Trụ sở: 16 Lê Hồng Phong - Ba Đình - Hà Nội;
Điện thoại: Văn phòng: 080.43162;Fax: 080.48924;
Email: thongtinchinhphu@chinhphu.vn.
Tải ứng dụng:
BÁO ĐIỆN TỬ CHÍNH PHỦ

Quét mã QR để tải